Much of our driving experience is wrapped up in sounds that happen when you press the pedal to the metal. Like Superman emerging from a phone booth, this 2006 Jetta seems different. The project connects RPM data from an OBD2 diagnostic sensor with the input of the car radio. Via synthesizers.
[update 11/2013 – source code is available at https://github.com/tkzic/automax – this version features
- V8 engine
- Jet engine
- Spaceship
- Star Trek TOS transporter button
- Korg nano-control Midi controller interface]
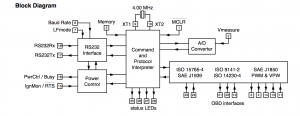
This project uses the RPM data from an automobile OBD-II port to control the engine speed of an engine simulation from Andy Farnell’s book “Designing Sound”
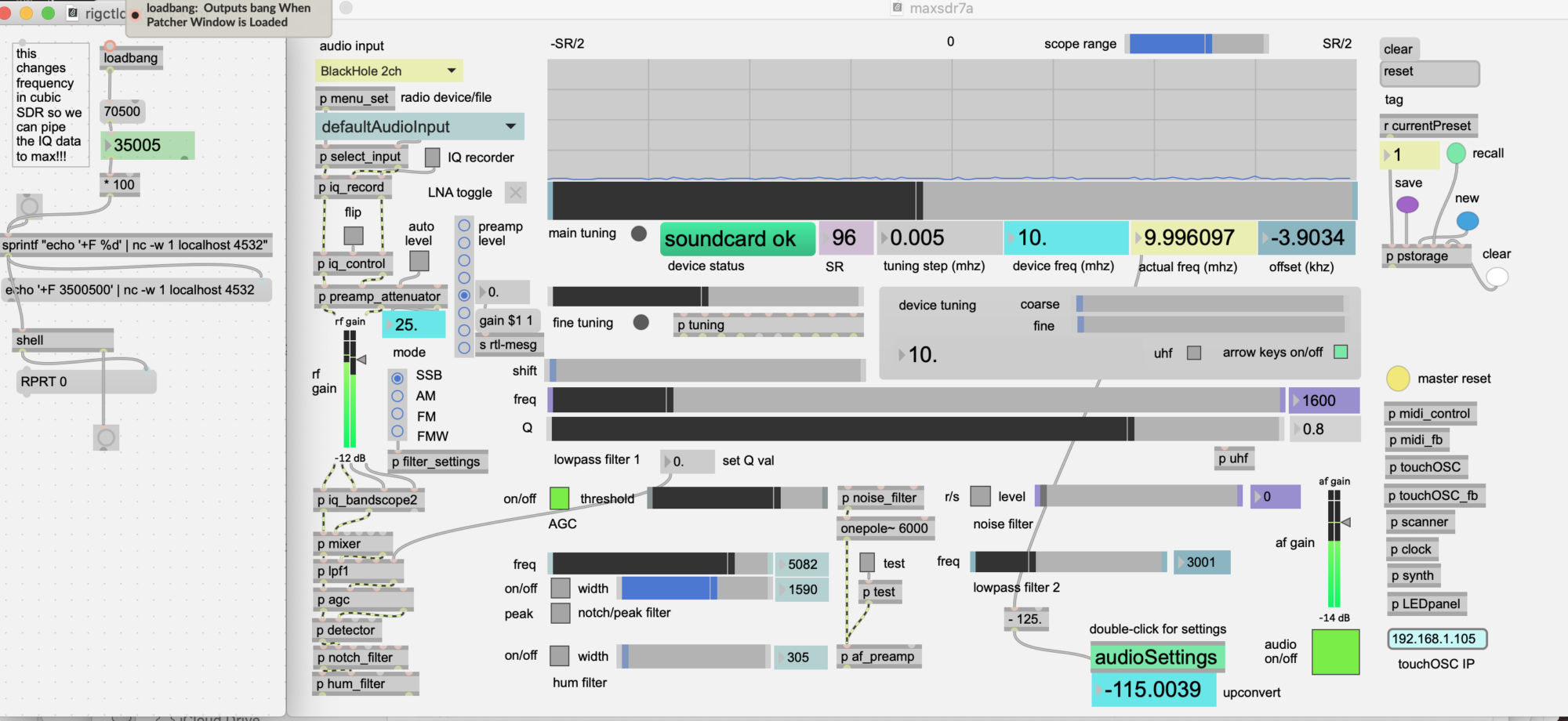
Here’s the patch that polls and translates OBD-II data

patch is tkzic/automax/rpm4.maxpat
Here’s a Max version of the Farnell car engine simulation:

patch is tkzic/automax/waveguide_engine2e-1.maxpat