
How to control an amateur radio transceiver over the internet, using Osc (Open Sound Control), VOIP (Voice over Internet Protocol) and VPN (Virtual Private Networks).
What problem does this solve?
Using a shortwave radio receiver in a live performance without installing a large antenna system.
This method gives low-latency real-time access to audio, and radio control using a laptop computer from anywhere. I suppose it could also remote-control a synthesizer, if you’re into that kind of thing.
CAT
Modern ham radio receivers can be controlled using serial commands using the CAT (Computer Aided Transceiver) protocol. Usually this is done via a USB port. There are hardware solutions for remote controlling radios over the internet, like RemoteRig http://www.remoterig.com/wp/. But there is also a free, or low cost, solution using software.
System diagram
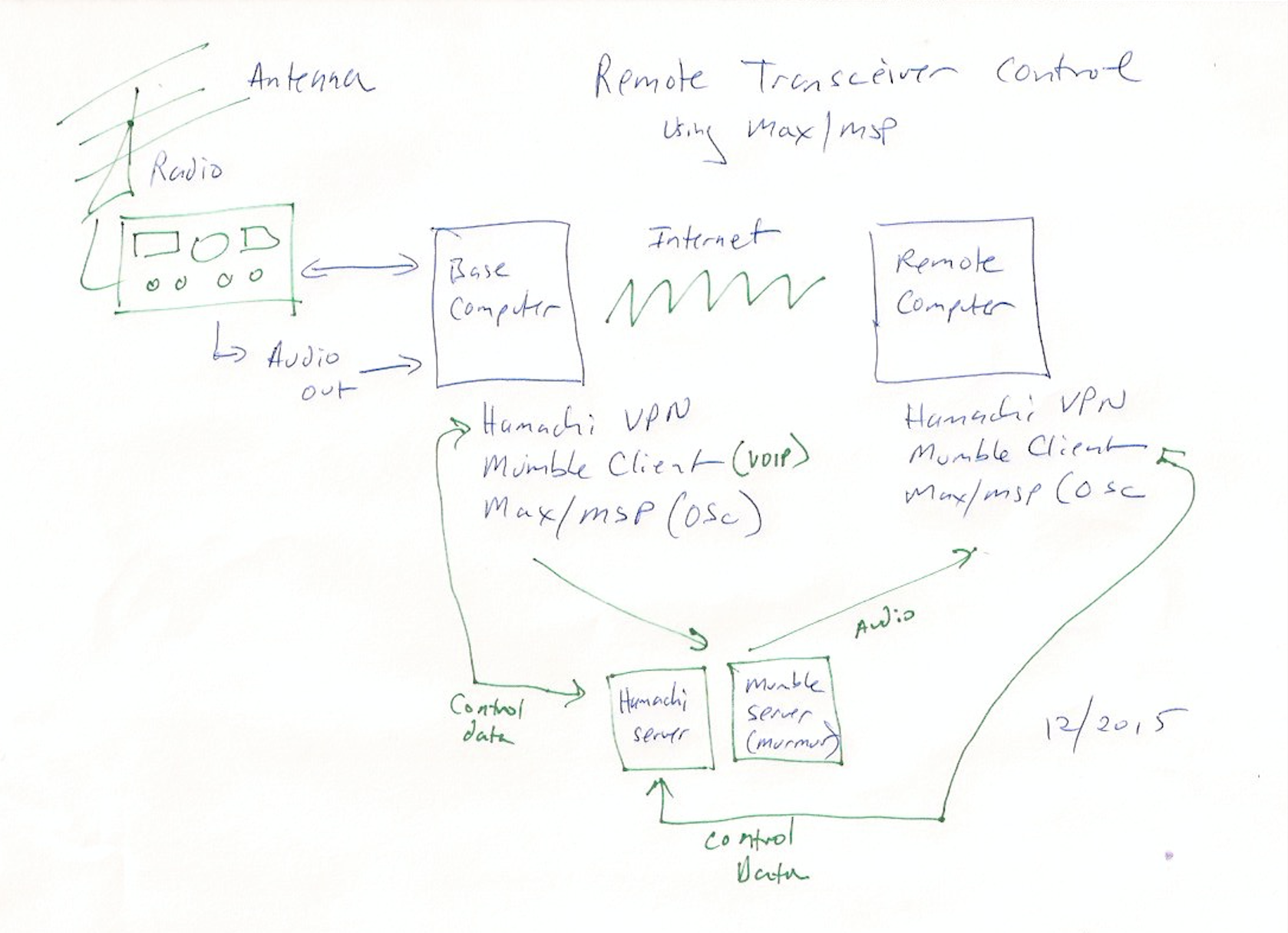
The ‘base’ computer is connected to the radio/antenna. The ‘remote’ computer is a laptop that could be anywhere connected by WiFi
For this experiment we used a TenTec Eagle transceiver connected to a MacBook USB port. The audio output of the radio connects to the audio input of the MacBook. The MacBook is directly connected to an internet WiFi router using an ethernet cable.
VOIP
A mumble client runs on the base computer, https://en.wikipedia.org/wiki/Mumble_(software) and also on the remote laptop. Both clients are connected to a Mumble server (Murmur) at Mumble.com http://www.mumble.com/mumble-download.php. You could also run your own server. I set the audio to the best quality and muted the microphone on the remote laptop. We are only using the laptop as a receiver. For transmitting, you could simply open up another channel on the Murmur server. Mumble has very low latency (compared to Skype) and decent audio quality.
Bi-directional commands using VPN and OSC
CAT commands go in both directions – to and from the radio. For example, you would send a command to the radio to change frequency. The radio would send acknowledgements back to the remote laptop.
This is a problem for networks that use NAT (Network Address Translation) because local IP addresses are private, hidden behind routers. The solution that eventually worked was using a VPN called Hamachi https://secure.logmein.com/products/hamachi/download.aspx on both the remote and base computers. Hamachi servers are setup on both computers and connected to each other. This allows the computers to ‘see’ each other as if they were on a local network.
Max and Osc
Max patches are run on both the base and remote computers. The Max patch on the base computer connects to the radio using the serial object and passes commands back and forth over the internet using udpsend and udpreceive (which use Osc).
The Max patch on the remote MacBook sends and receives commands from the base computer using updsend and udpreceive. With the Hamachi VPN, Osc works just like it does on a LAN (local area network).
Automatic reconfiguration of clients
The main advantage of this system is that when you move the remote MacBook to a new location – for example, a coffee shop with public Wifi – both the Mumble and Hamachi clients automatically reconfigure for the location. So you don’t need to know the actual IP address of your computer in the coffee shop. The reconfiguration usually happens within seconds after the Wifi connection is made.
Alternatives
If you are just working across a LAN, you don’t need a VPN. Osc will run on a local network using private IP’s.
You could also try Ross Bencina’s Oscgroups http://www.rossbencina.com/code/oscgroups. Although I was not able to get Oscgroups to work, other than in a LAN.
For uni-directional Osc communication from remote to base, in a WAN (wide area network) you can use a static IP address for the target.
Skype is another (free) solution for transmitting VOIP audio. Set the base computer in auto-answer mode and call it from the remote computer. Skype will process the audio more than mumble, with noise gates and such. And the latency is higher. But its very easy to set up.
Development
The next step is to build a remote interface for the radio that uses Midi/Osc controllers, so for example you can turn a dial on the Midi controller to change frequency or filter settings on a base radio.
to be continued…









