http://www.infinitestringquartet.com
Music by: Úlfur Eldjárn
Graphic designer Sigurður Oddsson
Programming by: Halldór Eldjárn.
http://www.infinitestringquartet.com
Music by: Úlfur Eldjárn
Graphic designer Sigurður Oddsson
Programming by: Halldór Eldjárn.
Web GL Interactive graphics.
By somebody?
(runs in Chrome or Firefox)
Music: “Awake” by Tycho: https://www.youtube.com/watch?v=Y9mvrHdWDgU
Jitter computer vision library
By Jean-Marc Pelletier
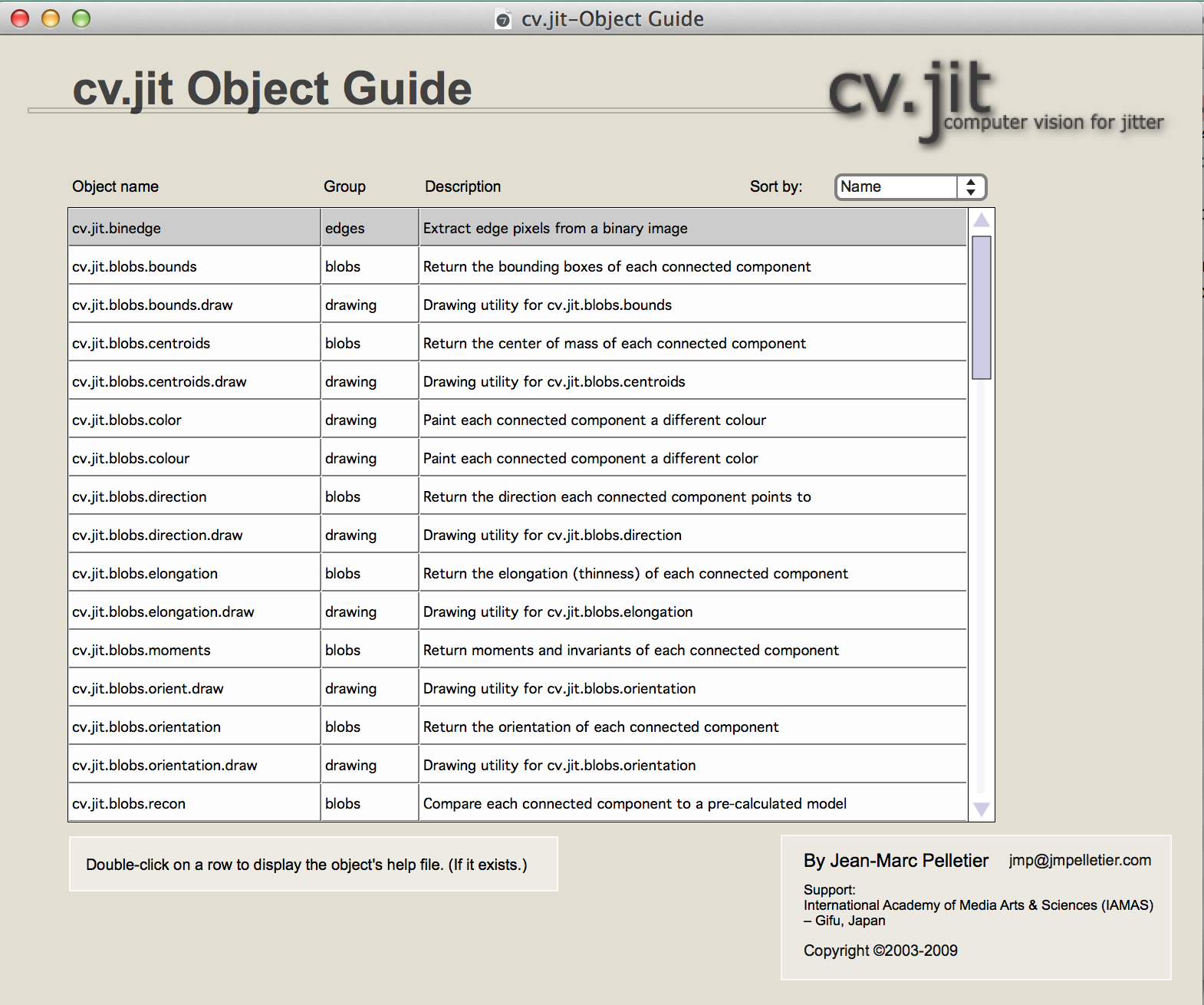
Several examples you can try by running the “help” files. All of the explanatory text below is by Jean-Marc Pelletier.
The utility abstraction cv.jit.blobs.elongation.draw superimposes elongation values on the image sent to its right inlet. You MUST also connect the output of cv.jit.blobs.moments to its middle inlet. You can use the attribute “frgb” to set the colour used.
Marks as ON only pixels that are themselves ON and have a least one OFF neighbour. In other words, it returns only the edges in a binary image.

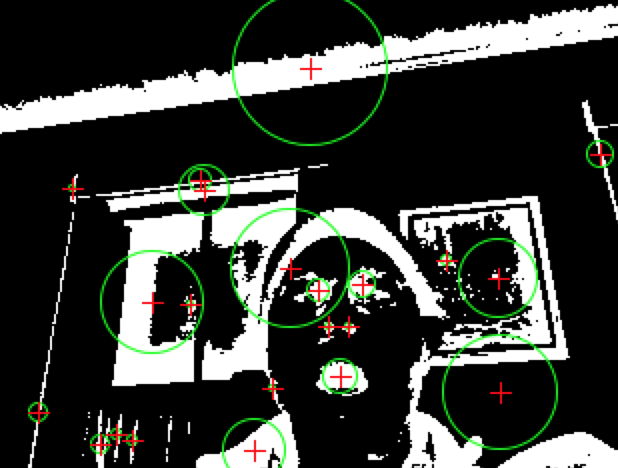
cv.jit.blobs.bounds offers similar functionality to jit.findbounds but finds the bounding box for every blob in a labeled image.
cv.jit.blobs.bounds outputs a 4-plane 1-dimension float32 matrix whose number of cells is the same as the number of blobs in the input image.

cv.jit.blobs.centroids functions much like cv.jit.centroids except that it takes for input the output of cv.jit.label and calculates the center of mass and area of each connected component individually.
The output of cv.jit.label must be of type char.
cv.jit.blobs outputs a single-row, 3-plane char matrix where the number of cells is the same as the number of labeled components.
cv.jit.blobs.direction is almost identical to cv.jit.blobs.orientation. It also takes in the output of cv.jit.blobs.moments and calculates the orientation of each blob’s main axis. However, unlike cv.jit.blobs.orientation, it takes into account symmetry. This means that cv.jit.blobs.direction can tell which direction a connected component is pointing.
Like cv.jit.blobs.orientation, the output is in radians by default and can be changed to degrees with the “mode” attribute. The output is between 0 and 2Pi.

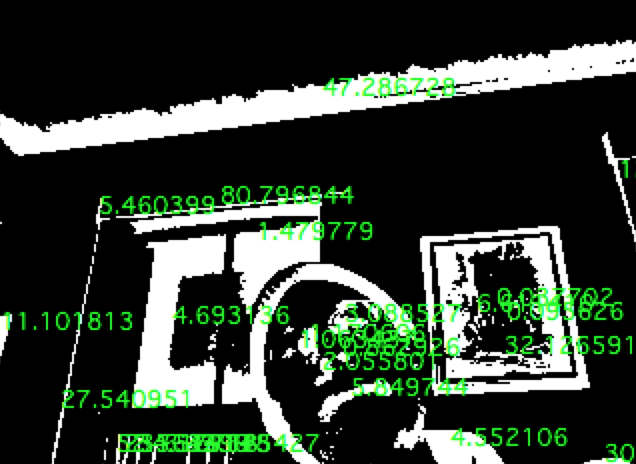
cv.jit.blobs.moments functions much like cv.jit.moments but computes moments and invariants for every blob identified by cv.jit.label. See cv.jit.moments for a discussion on moments and invariants.
The output is a 17-plane, single-row float32 matrix. The number of cells is the same as the number of connected components.
The output of cv.jit.moments can be fed to other objects for further analysis. See cv.jit.blobs.orientation, cv.jit.blobs.direction, cv.jit.blobs.elongation, and cv.jit.blobs.recon.
cv.jit.blobs.orientation functions much like cv.jit.orientation except that it takes for input the output of cv.jit.blobs.moments and calculates the orientation of the main axis of each connected component individually.
cv.jit.blobs.orientation outputs a single-row, 1-plane char matrix where the number of cells is the same as the number of labeled components.
Orientation is measured in radians by default but you can switch to degree output by specifying “mode 1”. The values are between 0. and Pi radians, with the extremes being horizontal and Pi/2 vertical.

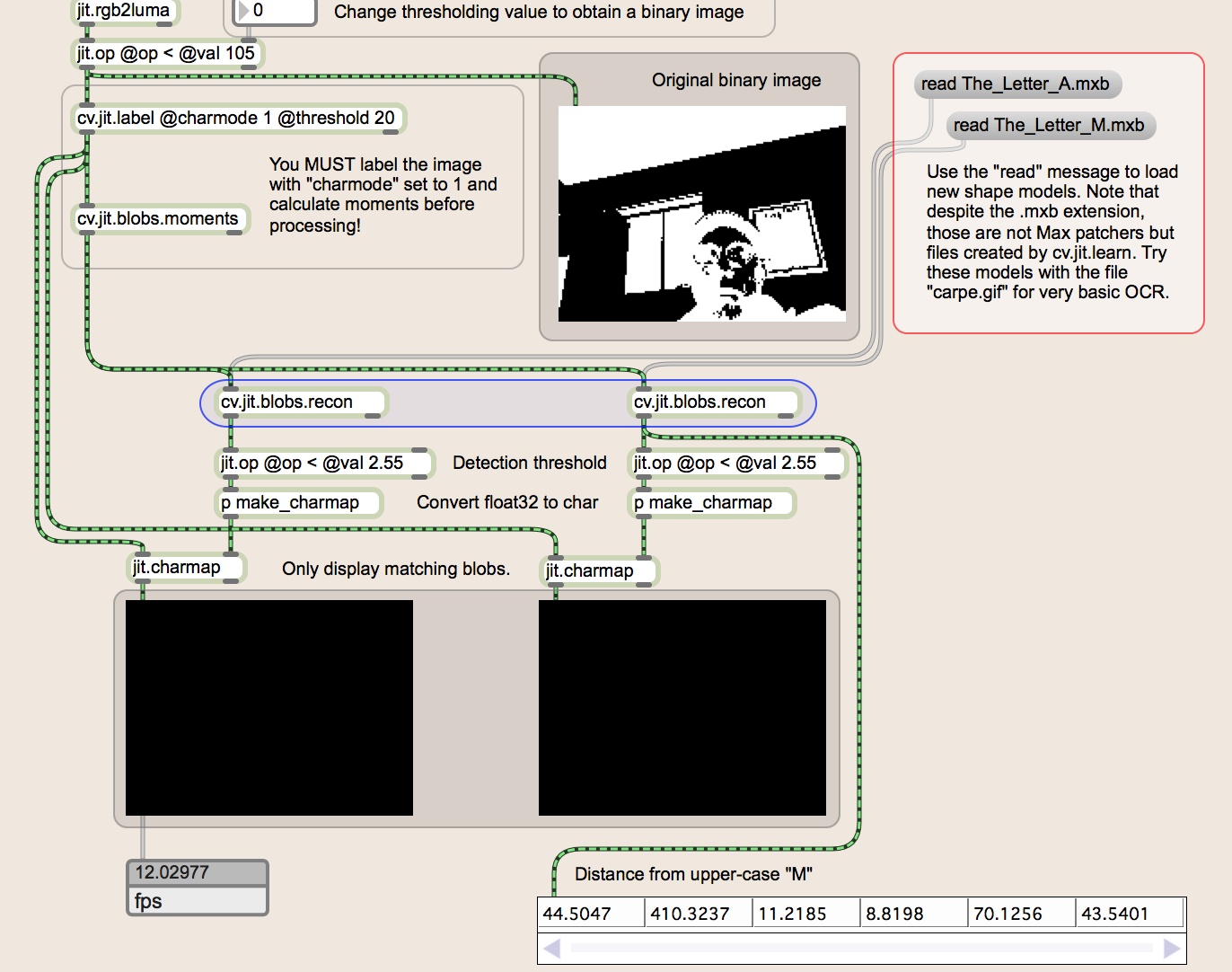
cv.jit.blobs.recon calculates the statistical distance between blob shape descriptors and a pre-computed model. The model must be created using cv.jit.learn, and cv.jit.blobs.recon functions much like cv.jit.learn’s “compare” mode.
cv.jit.blobs.recon must be fed the output of cv.jit.blobs.moments. Use the “mode” attribute to set whether moments (0) or Hu invariants (1) are used. Make sure that this matches the data used to train the model.
The output is a 1-plane float32 matrix, in which each cell contains the statistical distance between the corresponding blob and the model.. The lower the output value, the more similar the blob’s shape is to the model.
From tutorial 21b by dude837
https://www.youtube.com/watch?v=COl3ft1PPNU
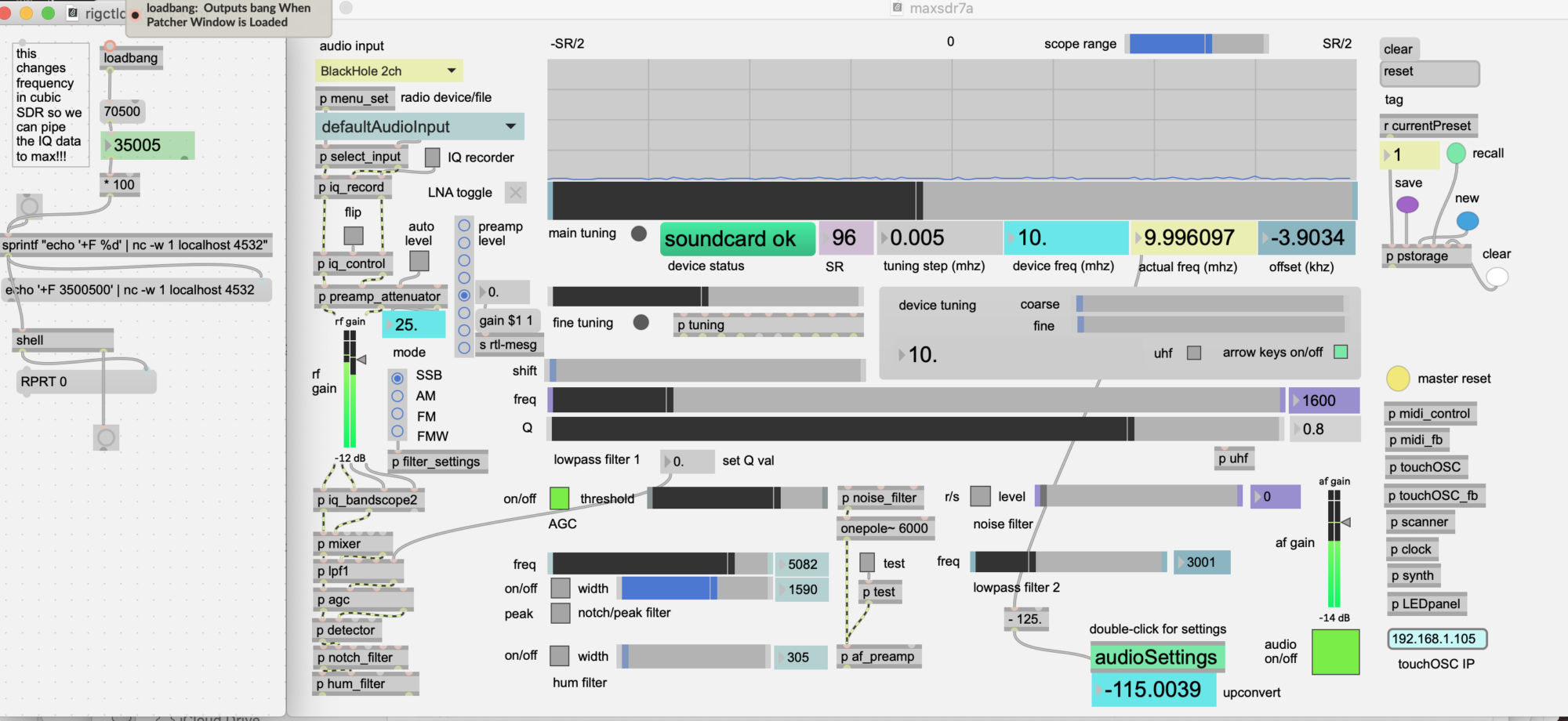
There was a problem with the spheres not returning to the resting position. They were constantly expanded outward. By removing the frame rate trigger from qmetro, and triggering only when audio data is received, the response was improved. You can also set signal amplitude going into the bonk~ object.

https://github.com/tkzic/max-projects
Folder: physics
Project: bumper-phsyics
External objects: bonk~ from: http://vud.org/max/
Images of original paintings
at shopgoodwill.com
http://www.shopgoodwill.com/listings/listByCat.asp?catID=71&ending=Items
Painting by Mimi Becker

Reduce and optimize a color palette with Gimp.
By AmeliaBR at graphicdesign.stackexchange

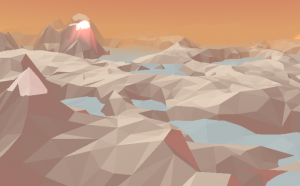
With high quality texture displacement.
By Andrew Benson
A self portrait made with the Max patch below.

Download patch: hsflowdistort.zip
More from Andrew Benson:
An example by Axiom Cruz:
Optical flow, a depth camera, and edge detection.
By Matt Romein
https://cycling74.com/project/gif-portraits/
Portrait of Margo Cramer from http://mattromein.squarespace.com/#/portrait-series/
The programming uses the following external code:
jit.gl.hap – Rob Ramirez
ab.hsflow.jxs – Andrew Benson
jit.openni – DiabloDale
cv.jit – Jean-Marc Pelletier
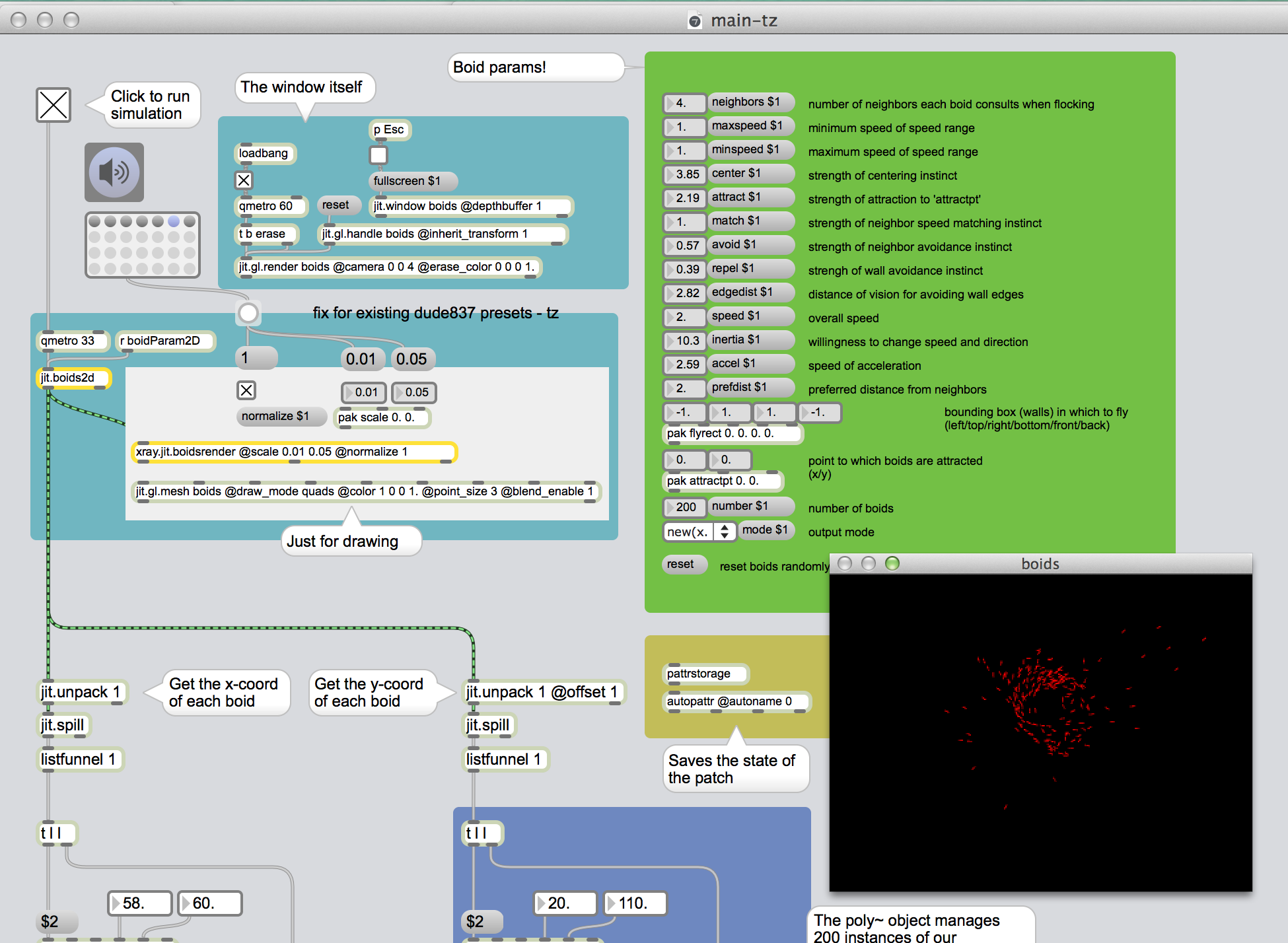
“Boids is a bird flight and animal flock simulator. It is based on the same algorithm which was used in “Jurassic Park” for herding dinosaurs.”
Max external by Singer, Jasch, Sier and Smith. Tutorial by dude837
https://github.com/tkzic/max-projects
folder: boids
project: boids23
patch: main-tz.maxpat (slight modification to enable existing presets to work)
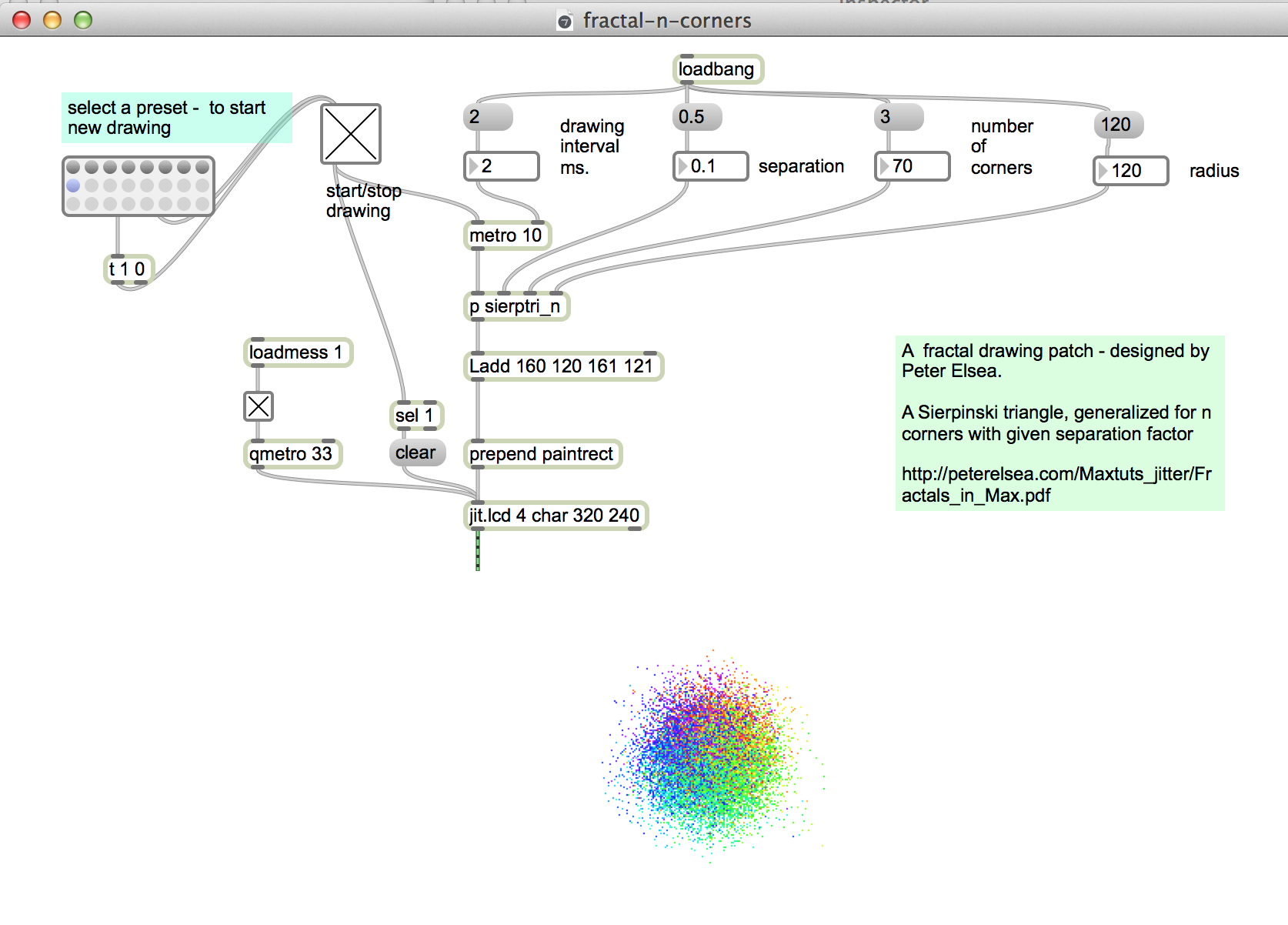
Fractal geometry with Jitter.
By Peter Elsea
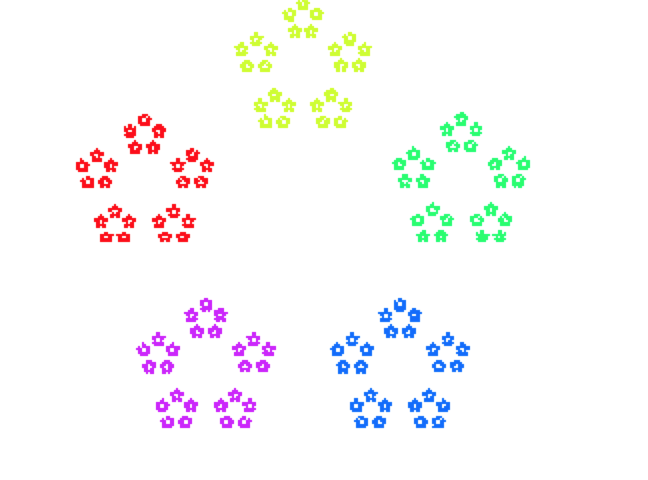
“Fractal geometry is the study of objects that have a property known as self- similarity – They are made up of smaller copies of the overall shape. One of the most popular is called the Sierpinski triangle”
The Max patches were developed (stolen) from Elsea’s lecture notes at http://peterelsea.com/Maxtuts_jitter/Fractals_in_Max.pdf. The first patch draws Sierpinski triangles. The second patch is generalized to circular shapes with N corners.
https://github.com/tkzic/max-projects
folder: fractals
patches:
You will need to download Elsea’s Lobjects abstractions and add the path to Max in Options | File Preferences: http://peterelsea.com/lobjects.html